Präzise, flexible Stereo Vision
Stereo Vision
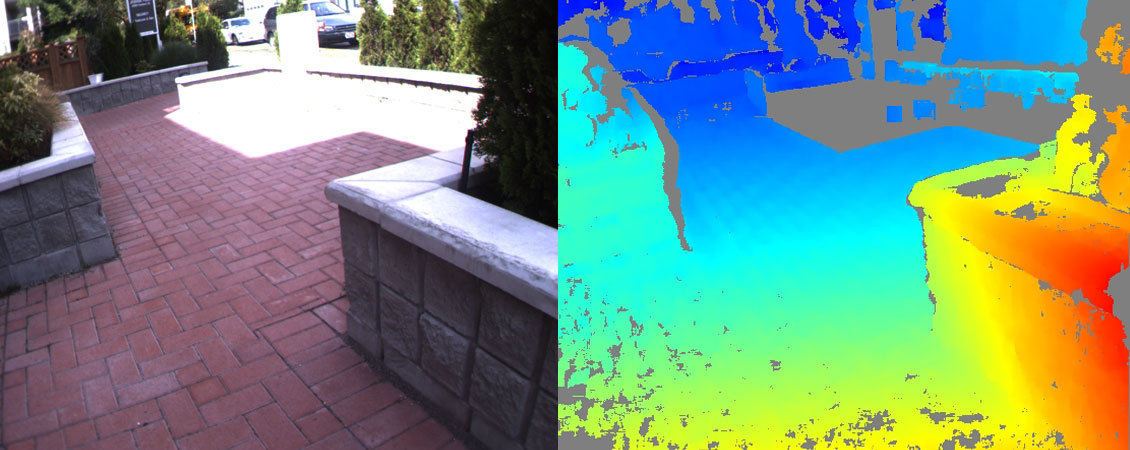
FLIR hat Stereo Vision für eine Vielzahl von Forschungsbereichen praktisch nutzbar gemacht. Wir haben Hardware- und Software-Pakete im Angebot, welche die komplette Stereo-Verarbeitung übernehmen – von der Bildkorrektur über die Ausrichtung bis zum korrelationsbasierten Mapping. Stereo Vision arbeitet in ähnlicher Art und Weise wie die dreidimensionale Wahrnehmung beim Menschen. Es beginnt mit der Identifikation von Pixeln in mehreren Kamera-Bildern, die dem gleichen Punkt in der realen Szene entsprechen. Die 3D-Position des Punktes erhält man durch die Triangulation der Strahlen, die aus diesem Punkt zu jeder Kamera verlaufen. Je mehr korrespondierende Pixel gefunden werden können, desto mehr 3D-Punkte können mit einem einzigen Bildpaar bestimmt werden. Der Korrelationsansatz versucht für jedes Pixel eine Korrespondenz im zweiten Stereobild zu finden, was zu zehntausenden 3D-Datenpunkten je Stereobild führt.
Kalibriergüte und Bildkorrektur
Die Objektiv-Verzerrung und Kamera-Ausrichtung der Stereo-Vision-Kameras von FLIR werden werksseitig kalibriert, um bei allen Kameras eine gleichbleibende Kalibrierung zu gewährleisten und um eine Kalibrierung vor Ort überflüssig zu machen. Während des Korrektur-Prozesses werden epipolare Linien mit einem durchschnittlichen Fehler von nur 0,05 Pixel aneinander ausgerichtet. Die Ergebnisse der Kalibrierung sind auf der Kamera gespeichert, wodurch die Software diese Daten eigenständig auslesen kann, ohne Kamera-spezifische Dateien auf dem Host-Computer zu benötigen. Das erlaubt den nahtlosen Austausch von Kameras und vereinfacht den Aufbau von Multi-Kamera-Systemen. Das Kamera-Gehäuse ist zudem extra darauf ausgelegt, die Kalibrierung gegen mechanische Stöße und Vibrationen zu schützen.
Bilder können auf jede Bildgröße korrigiert werden, wodurch es einfach ist, die Auflösung der Stereo-Analyse auf die Anforderungen an Geschwindigkeit und Genauigkeit anzupassen. Kamera-Kalibrierung und -Korrektur sind entscheidend, um hochqualitative Tiefenbilder aus Stereo-Kameras zu erhalten.



Triclops SDK
Das Triclops ™ Software Development Kit (SDK) ist im Lieferumfang aller FLIR IEEE-1394 Stereo Vision-Produkte enthalten und wird zur Bereitstellung von Tiefenbereichsbildern in Echtzeit mithilfe der Stereo-Vision-Technologie verwendet.
Weitere Informationen